|
实验设置目标:
机器人的设计和制作涉及了机械结构设计、电路设计、运动控制等一系列专业知识的应用,是机电一体化系统设计与制作的最典型案例。对机电类专业学生知识综合运用能力和创新能力。在机器人设计和制作中,虚拟设计与运动仿真能保证设计方案的可行性、节约设计成本、节省设计周期。要让学生机器人的运动控制涉及复杂的运动规划、动力学解算、避障跟踪等问题,通过虚拟仿真预演,让学生掌握相关原理和方法,可以依次理解并完成机器人运动的手工简单控制,单机器人较复杂运动的作业文件控制以及更复杂的双机器人协作运动控制。
实验课程内容与成效:
实验一 机器人结构设计与动力学仿真
利用Solidworks、OpenGL等仿真软件,开展了机器人创新设计类课程的本物理仿真,训练学生设计并构建机器人运动控制与仿真。通过构建基于网络的主从式临场感机器人交互系统。实现对机器人机械结构设计、运动控制算法、视觉环境建模、力触觉交互和临场感等多方面技术的综合运用和直观验证。

实验二 机器人运动控制与规划
实验内容――
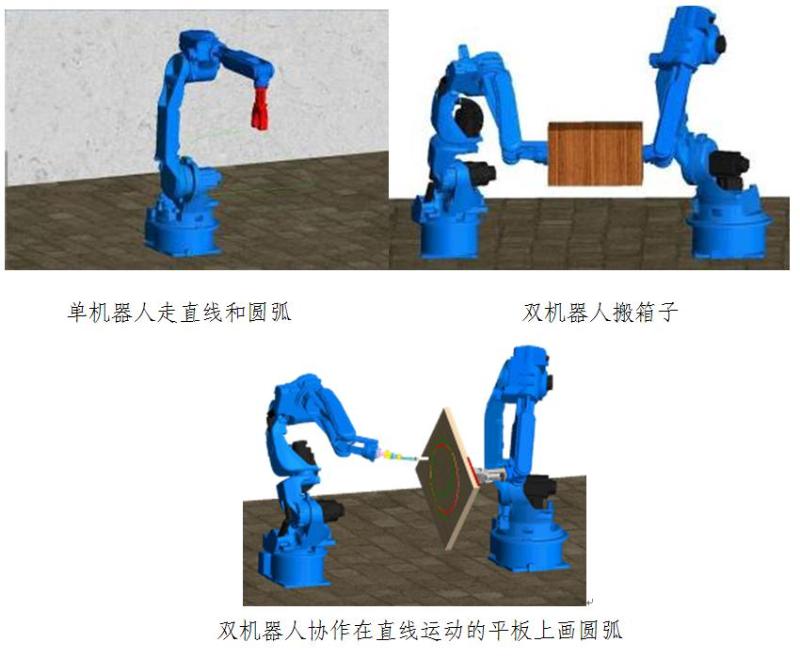
机器人基本运动仿真,包括直角空间运动,关节空间运动,运动速度调节,位姿信息查看等;
单机器人运动控制仿真,包括单机器人作业文件规划与执行;
双机器人运动控制仿真,包括双机器人协作作业文件规划与执行。
实验功能及效果――
采用三维CAD软件SolidWorks为平台进行二次开发,以D-H坐标系建立方法为机器人进行运动学建模并在此基础上添加机器人运动正解和逆解算法。逼真的示教盒界面控制机器人在直角空间或关节空间运动,并可以进行运动速度调节和位姿信息查看。逼真直观的机器人运动控制场景突破了传统教学中机器人运动控制的抽象性,增加了对机器人直角空间运动,关节空间运动的感知性,便于同学们更好地掌握坐标系建模方法和机器人运动学正解和逆解原理。

采用三维CAD软件SolidWorks为平台进行二次开发,以标准的INFORM3为作业文件描述语言,在仿真示教盒中规划单机器人作业文件并执行。该实验展示了如何通过作业文件控制机器人连续地完成较复杂运动,以突破手工交互只能断续完成较简单运动的限制。
采用三维CAD软件SolidWorks为平台进行二次开发,以标准的INFORM3为作业文件描述语言,在仿真示教盒中规划双机器人协作作业文件并执行。该实验示例了如何通过双机器人的协作控制完成单机器人无法完成的工作任务。
|
