|
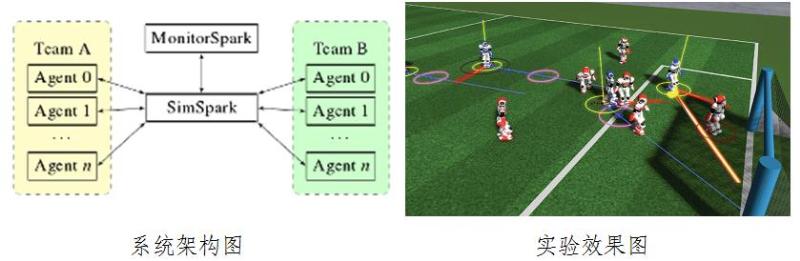
实验项目1――RoboCup 3D仿真中双足机器人的运动规划与协作机制
实验设置目标:
采用多层结构控制器来实现机器人的双足全向行走,并利用学习算法训练实现最快速度下的稳定步态;
研究并实现机器人在复杂环境下基于智能算法的动态避障方法;
研究仿真比赛中的多机器人的动态角色分配和占位策略,实现多机器人之间的协作和对抗机制。
实验课程内容与成效:
实现复杂环境中仿人机器人的全向行走和动态避障算法;在个体智能实现基础上,研究动态环境中仿真多机器人的有效协作对抗策略,提高团队的整体进攻防守效率,最终实现建立一支完整的具有竞争力的类人机器人足球仿真队伍。
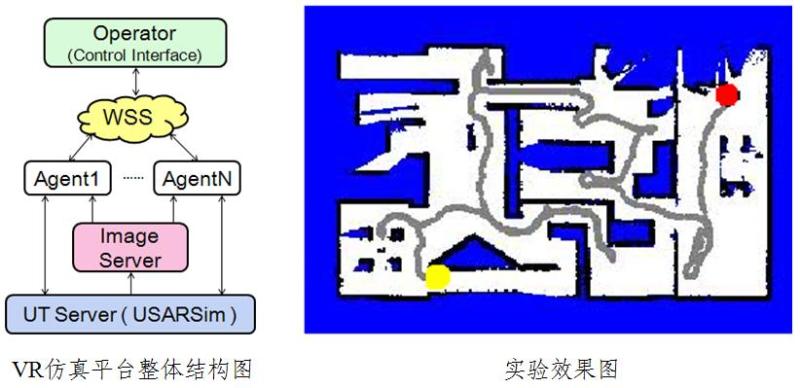
实验项目2――RoboCup 虚拟机器人(VR)平台的机器人操控策略研究
实验设置目标:
采用非严格分层的智能体结构,在具有插件机制的核心智能体模块上根据新增虚拟机器人的类型增加系统新功能;
研究并实现机器人在复杂环境下的同时定位与地图构建
研究VR机器人在复杂环境中的自主导航;
采用多智能体协作实现VR平台中多个机器人的操控策略。
实验课程内容与成效:
研究机器人在未知灾害环境下搜索以及营救受害人策略,虚拟机器人在完全未知的环境中依靠配置的传感器获得环境信息完成同时定位和地图创建,从而实现智能自主导航。
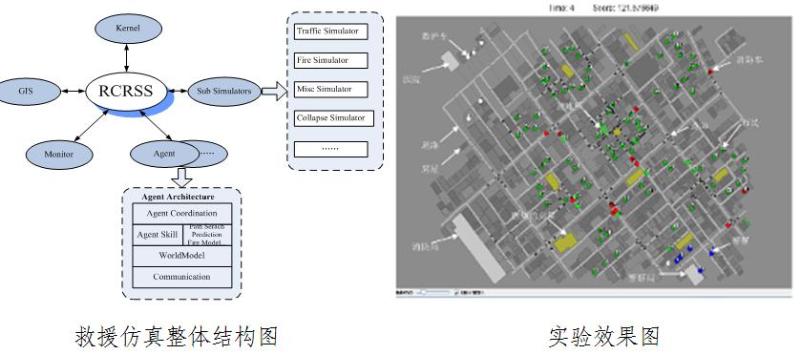
实验项目3――RoboCup救援仿真平台中的多智能体协作策略研究
实验设置目标:
基于粒子滤波算法对着火建筑的温度进行预测,利用预测结果得到消防所需水量,对火灾的决策提供有力的基本信息支持;
使用K-means聚类算法将着火建筑自适应分成各个着火建筑群,把智能体的任务对象由单个建筑变为建筑群,并分别定义为扑灭,控制,放弃三种层次;
基于人工免疫算法对多种智能体进行任务分配,使智能体的行为目的更加明确。
实验课程内容与成效:
研究在城市救援中,当处于复杂动态且人力资源少、通信受限的环境中时,如何对火势进行有效预测和控制,并结合消防智能体的任务分配优化来制定RoboCup救援仿真中的消防策略,以提高整体救援效率。
我校多年来一直组织学生开展机器人robocup的培训和比赛活动。自2007年以来,获得robocup3D国际和全国仿真比赛冠军6次,虚拟机器人组冠军2次,亚军3次,救援组亚军4次。
|
