|
实验设置目标:
本项目是让本科高年级学生将力触觉虚拟再现技术、机器人机械与运动控制技术、网络传输与通讯技术、计算机建模与图像处理技术相结合,构建具有虚实融合和远程监控功能的主从遥操作机器人系统。通过力触觉虚拟现实和虚实融合的图像处理方法,提高遥操作系统的主端控制的准确性和真实感。
实验课程内容与成效:
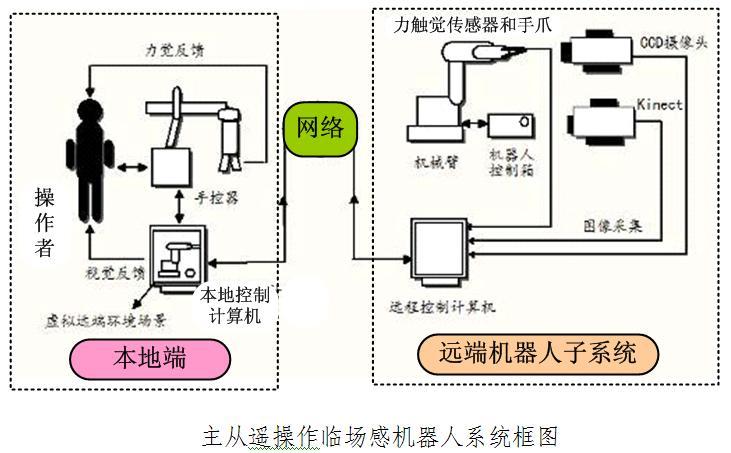
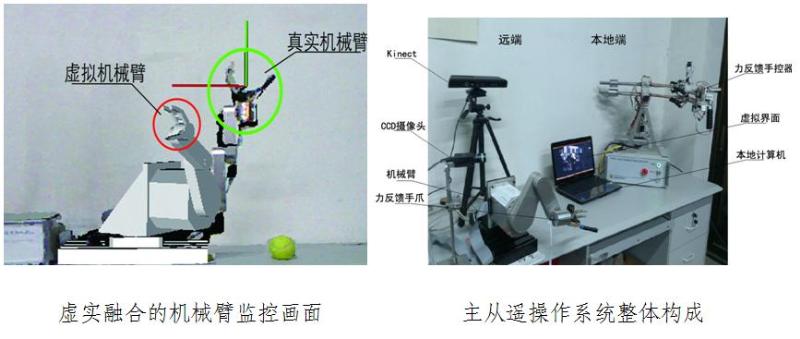
主从遥操作机器人系统由主端带力觉再现的手控器、虚拟融合的远端监控场景以及从端带力传感器和三维视觉采集的从机器人组成。主端操作者一边监控虚实融合的三维虚拟场景,一边通过手控器控制并感受从机器人的运动和接触力。操作者能在远距离和大时延环境下准确控制从端机器人,并获得身临其境的视觉、触觉感受,从而提高了控制的准确性和安全性。
本系统是一个典型的融合了虚拟现实技术的机电综合控制系统。该系统的构建锻炼了学生机械设计、加工制作以及电路设计的能力,也让学生通过该项目尝试并实现了虚拟现实技术在遥操作机器人技术中的应用。学生通过该项目,将虚拟现实技术与学科前沿技术及专业应用结合,获得2013年全国大学生挑战杯二等奖。
|
